Back to Robotics Hub

Intermediate Builds
Intermediate
Mar 21, 2026
Bluetooth Controlled Robot Car
Project Overview
In this intermediate build, we integrate the L298N motor controller, DC gear motors, and an HC-05 Bluetooth module. We use a generic Bluetooth terminal app on Android to steer the rover.
Components Required
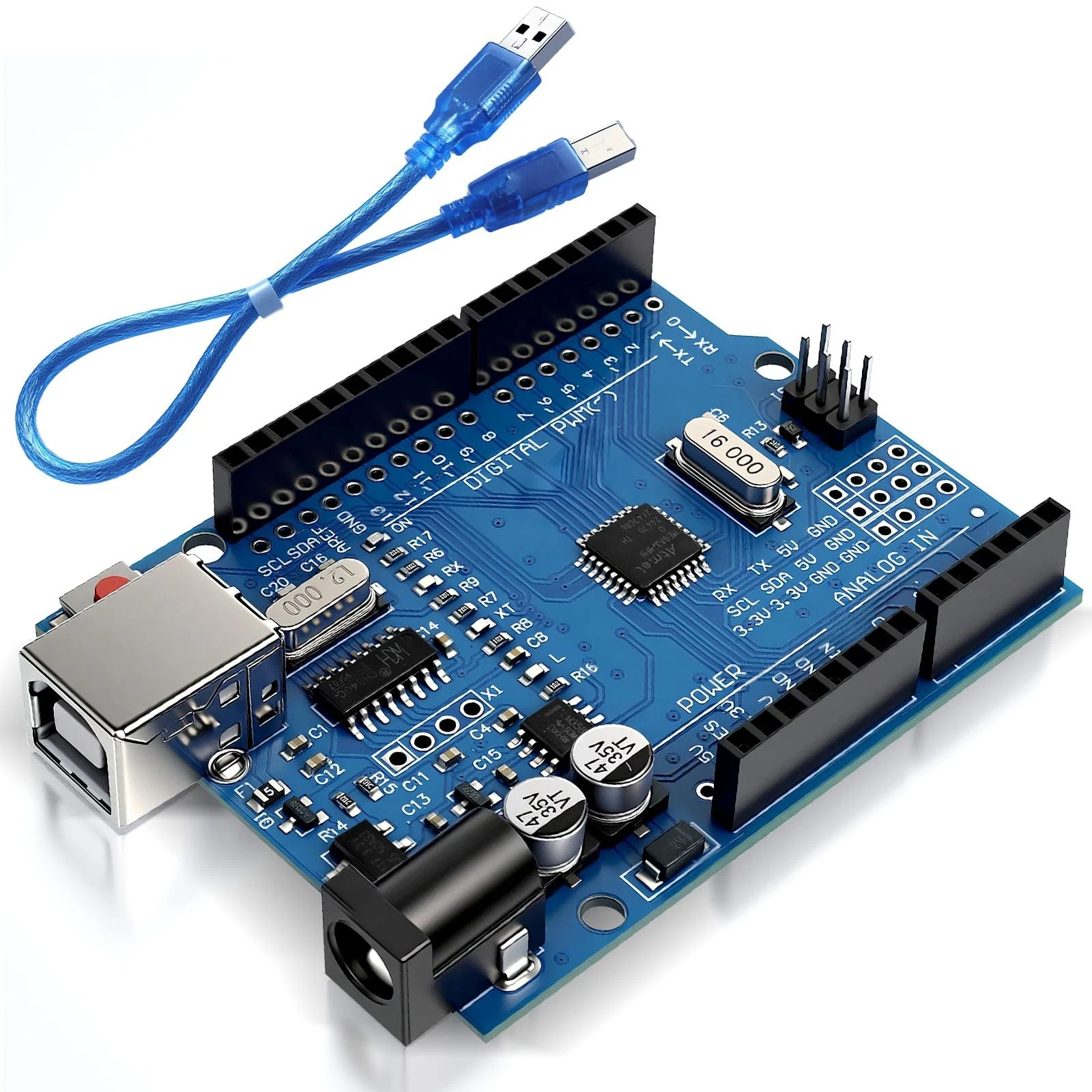
- 1x Arduino Mega or Uno
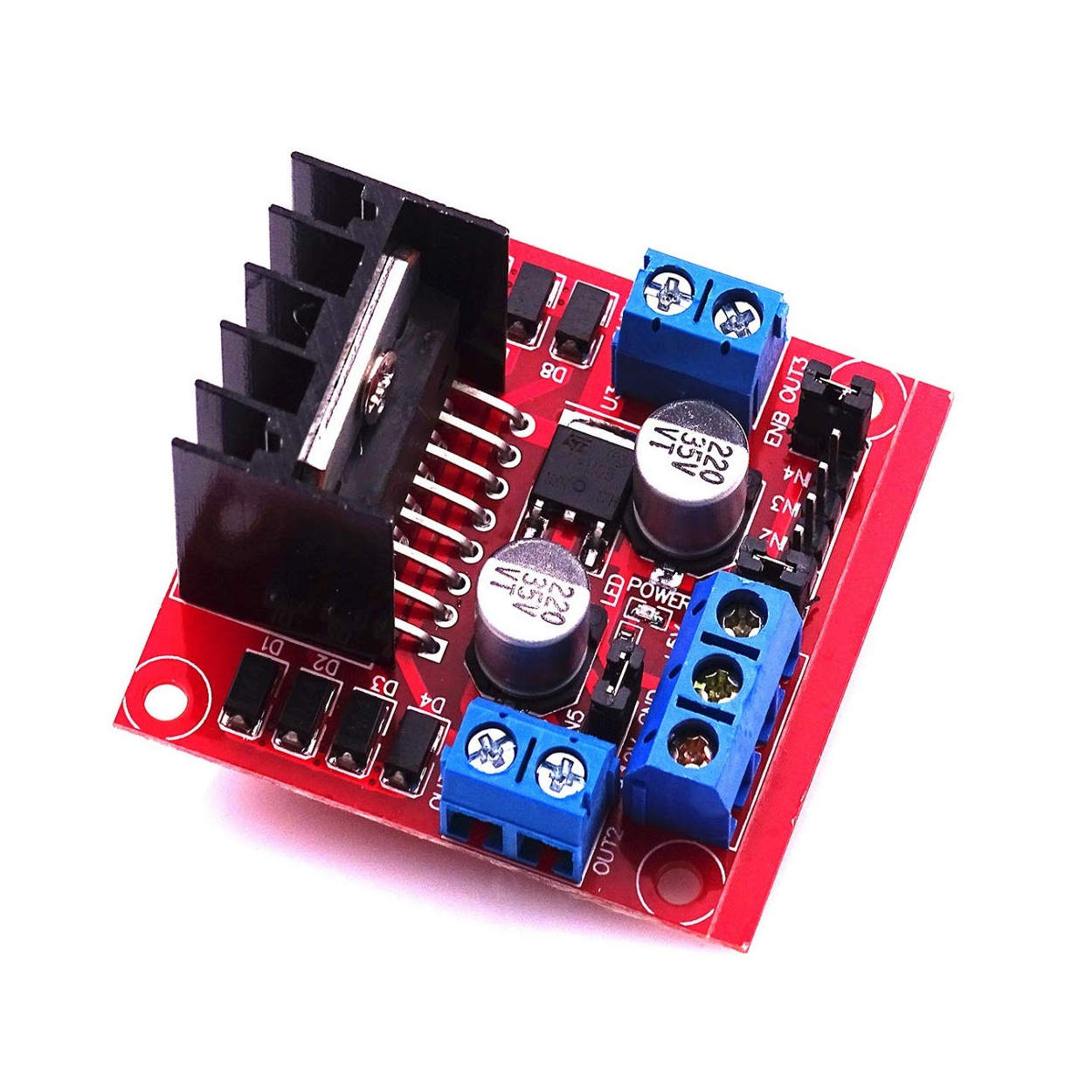
- 1x L298N Motor Driver
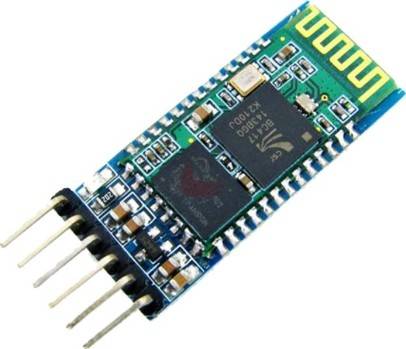
- 1x HC-05 Bluetooth Module
- 2x DC Gear Motors + Wheels
- 1x Robot Chassis
- 2x 18650 Batteries & Holder
Wiring Guide
Power the L298N with the battery pack. Connect the Arduino 5V/GND to the 5V out on the L298N. Wire the HC-05 TX to Arduino RX, and RX to TX (via a voltage divider for safety). Connect Motor A to IN1/IN2 (Pins 4, 5) and Motor B to IN3/IN4 (Pins 6, 7).
Source Code
char command;
void setup() {
Serial.begin(9600); // Bluetooth default baud
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
}
void loop() {
if (Serial.available() > 0) {
command = Serial.read();
if (command == 'F') { // Forward
digitalWrite(4, HIGH); digitalWrite(5, LOW);
digitalWrite(6, HIGH); digitalWrite(7, LOW);
} else if (command == 'B') { // Backward
digitalWrite(4, LOW); digitalWrite(5, HIGH);
digitalWrite(6, LOW); digitalWrite(7, HIGH);
} else if (command == 'S') { // Stop
digitalWrite(4, LOW); digitalWrite(5, LOW);
digitalWrite(6, LOW); digitalWrite(7, LOW);
}
}
}